El picudo rojo (Rhynchophorus ferrugineus) es hoy una de las amenazas más graves para las palmeras en las regiones donde se ha establecido. Su capacidad destructiva no depende solo de la voracidad de las larvas, sino de un rasgo biológico que ha condicionado durante décadas todas las estrategias de manejo: el insecto se desarrolla dentro del estípite, oculto a la vista, y la palmera puede albergar una infestación avanzada sin manifestar síntomas externos evidentes. Cuando esos síntomas aparecen (caída de hojas centrales, asimetría de la corona, perforaciones con exudados), el daño interno suele ser ya considerable y las probabilidades de recuperación, escasas.
Esta dificultad para la detección precoz es el punto de partida de buena parte de la investigación reciente en sanidad de palmeras. Entre las herramientas propuestas, los sensores sísmicos han ganado atención por su capacidad de operar de forma continua sobre el estípite sin destruir tejido. El trabajo de Mendel y colaboradores, publicado en Pest Management Science, aporta uno de los análisis de campo más completos disponibles sobre su comportamiento en condiciones comerciales reales. Conviene leerlo con precisión, separando lo que el estudio demuestra de lo que podría interpretarse o extrapolarse a partir de sus resultados.
Qué son los sensores sísmicos aplicados a palmeras
Un sensor sísmico mide vibraciones mecánicas que se propagan a través de un material sólido. En el caso de las palmeras, registra las microvibraciones generadas dentro del estípite por la actividad de las larvas del picudo: principalmente su alimentación y desplazamiento a través del tejido. No se trata de un sensor acústico que capture sonido en el aire, sino de un dispositivo que detecta el componente vibratorio transmitido por el propio tejido del tronco.
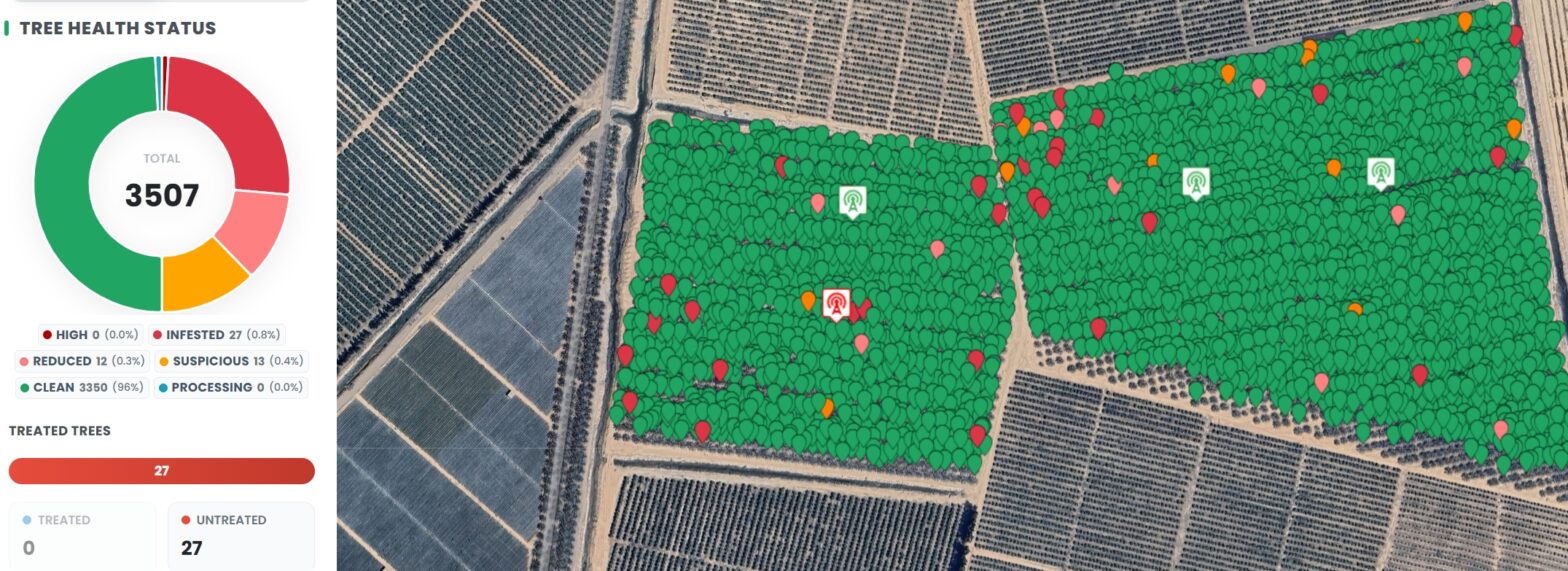
El sistema analizado en el estudio (IoTree, de Agrint) capta esas vibraciones mediante un tornillo metálico insertado unos 12-18 cm en el estípite. El dispositivo realiza lecturas en intervalos programados (entre 1 y 24 horas según la actividad detectada), filtra las señales para separar las vibraciones asociadas a la plaga del ruido ambiental, y transmite los datos a una plataforma en la nube donde un algoritmo de aprendizaje automático los procesa. El resultado se traduce en un valor numérico (el «valor del sensor») y en un índice de daño que clasifica el estado de la palmera en distintos niveles, desde «sana» hasta «infestación muy alta».
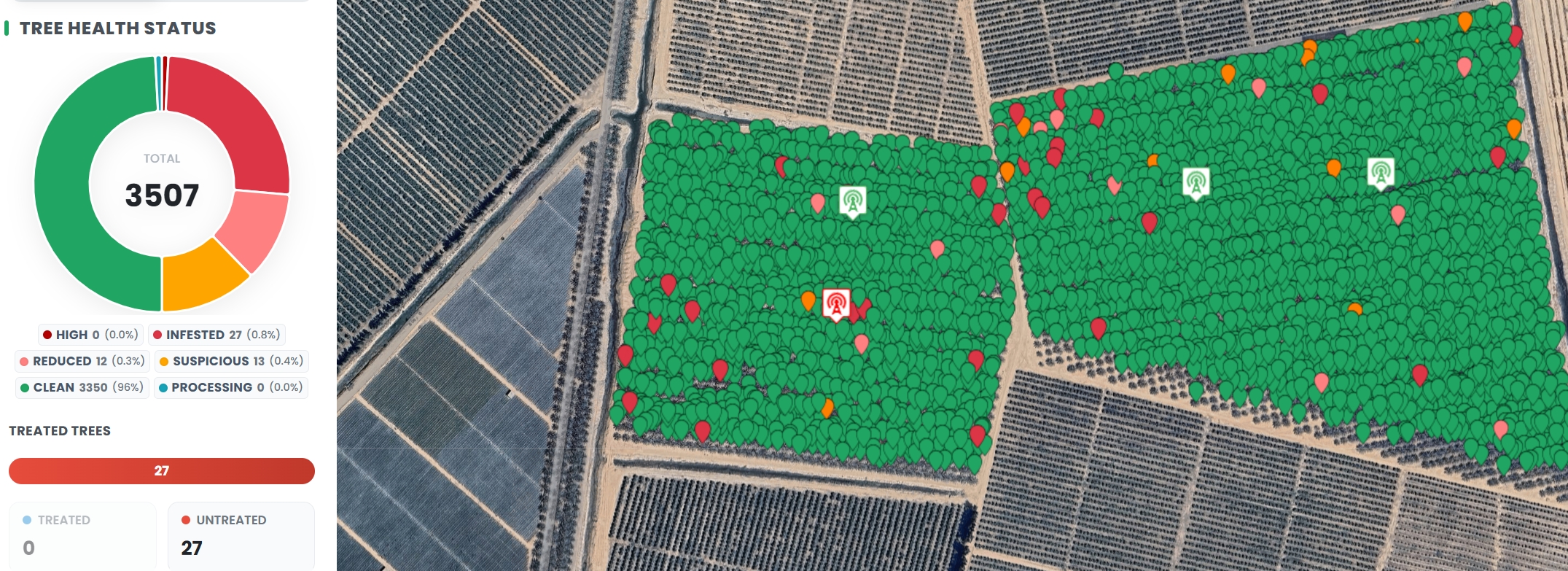
Es importante entender qué mide realmente el sensor: no detecta directamente la presencia del insecto ni cuenta larvas, sino que estima la intensidad de la actividad biológica en el interior del estípite a partir de la frecuencia de eventos vibratorios positivos por intervalo de muestreo. Esa estimación es la base sobre la que se construyen las decisiones de manejo.
Qué hizo el estudio de Mendel y colaboradores
El objetivo central del trabajo fue examinar la integración del sensor sísmico en el manejo del picudo rojo en plantaciones comerciales de palmera datilera (Phoenix dactylifera). La pregunta de investigación era concreta: ¿los datos del sensor y su traducción a un índice de daño aportan información confiable para decidir cuándo iniciar medidas de control?
Para responderla, los autores trabajaron en cuatro plantaciones comerciales, tres en Israel (Ein Yahav, Patza’el e Idan) y una en Abu Dhabi (Marai Al Ein). Las palmeras tenían entre 6 y 8 años y un diámetro aproximado de 45 cm. Los árboles se dividieron en dos categorías: palmeras sanas no tratadas, usadas como referencia, y palmeras infestadas que recibieron tratamiento curativo durante el seguimiento.
Los tratamientos evaluados fueron tres, cada uno en una localidad distinta y con un modo de acción diferente:
- Imidacloprid, un insecticida sistémico neonicotinoide, aplicado por vía radicular a través del sistema de riego (Ein Yahav y Patza’el).
- Fosfina, generada a partir de tabletas de fosfuro de aluminio insertadas en orificios perforados en el tronco y cubiertas con plástico, una fumigación curativa (Marai Al Ein).
- Nematodos entomopatógenos (Steinernema carpocapsae), aplicados por aspersión del tronco hasta escurrimiento, en dos aplicaciones separadas dos semanas (Idan).
El seguimiento se realizó midiendo el valor del sensor y el índice de daño cada dos semanas durante 12 a 18 semanas, divididas en tres etapas: pretratamiento, durante el tratamiento y postratamiento. La verificación previa de la fiabilidad del sensor, mencionada en el estudio, se había realizado en observaciones independientes en Arabia Saudita, Abu Dhabi e Israel, incluyendo casos de implantación artificial de larvas, con una precisión de detección cercana al 95% y un alcance de unos 130 cm a lo largo del estípite.
Principales hallazgos
El valor del sensor refleja la actividad biológica de las larvas
El resultado más sólido del trabajo es que los valores del sensor acompañan la dinámica real de la infestación. En palmeras sanas no tratadas, el valor medio del sensor se mantuvo bajo (10,0 unidades de media). En las palmeras infestadas, ese valor ascendió de forma marcada durante las primeras fases de colonización (25,8 de media) y alcanzó su máximo en el momento de aplicar el tratamiento (51,7 de media, con casos de fosfina superando las 80 unidades en palmeras muy avanzadas). Existió además una correlación significativa entre el valor del sensor y el índice de daño tanto en verano como en invierno (Spearman ρ ≈ 0,68 en ambos casos), lo que indica que ambos parámetros describen un mismo fenómeno subyacente.
Permiten medir objetivamente la respuesta a los tratamientos
Tras la aplicación de cada tratamiento, los valores del sensor descendieron de forma estadísticamente significativa en los tres casos. En las palmeras tratadas con éxito, el valor medio postratamiento volvió a niveles equiparables a los de las palmeras sanas (12,6 de media), sin diferencias significativas respecto al grupo de referencia. Este punto es relevante desde el punto de vista metodológico: el sensor ofrece una forma de cuantificar la respuesta al tratamiento sin necesidad de desmantelar el estípite para observar las larvas, un procedimiento destructivo e inviable a escala de campo.
El contraste con las palmeras tratadas sin éxito (tres ejemplares en la finca orgánica de Idan) refuerza esta lectura. En esos casos, el valor del sensor permaneció por encima del umbral después del tratamiento, coincidiendo con la persistencia de actividad de la plaga. El sensor, por tanto, distinguió tratamientos eficaces de tratamientos fallidos.
La recuperación de una palmera puede seguirse en el tiempo
Al disponer de mediciones seriadas, los autores pudieron calcular el tiempo de recuperación de cada palmera, definido como los días transcurridos desde el valor máximo registrado hasta el retorno a valores propios de palmeras sanas. Según los valores del sensor, ese tiempo fue de unos 2,8 días para los nematodos, 19,5 días para imidacloprid y 24,0 días para fosfina. Las diferencias responden al modo de acción y al momento de intervención de cada tratamiento, no a una jerarquía de eficacia establecida por el estudio. La recuperación más lenta de la fosfina se asocia, según los propios autores, al estado más avanzado de infestación de las palmeras de esa localidad al instalar los sensores.
Ayudan a priorizar recursos y decisiones de manejo
Al traducir el estado de cada palmera a un índice comprensible, el sistema permite concentrar la intervención en los ejemplares que realmente la requieren, en lugar de aplicar tratamientos preventivos generalizados a toda la plantación. En el esquema de manejo basado en sensores descrito en el estudio, solo se tratan las palmeras señaladas como infestadas. Esto tiene implicancias directas sobre el uso de insecticidas, los costos operativos y el impacto ambiental de los programas de control.
El valor principal está en la gestión, no solo en la detección
La conclusión central de los autores es que la utilidad demostrada del sensor no se limita a señalar una infestación, sino a sostener todo el ciclo de manejo: decidir cuándo intervenir, verificar si el tratamiento funcionó y seguir la recuperación del ejemplar. El estudio aporta evidencia de que el sensor puede sustituir, con fines de seguimiento, el desmantelamiento destructivo del tejido que tradicionalmente exigía la evaluación directa de la actividad larvaria.
Qué no demuestra este trabajo
La lectura rigurosa de un estudio exige delimitar con la misma precisión lo que no se ha probado. El propio artículo es explícito en varios de estos límites.
No detecta el 100% de los casos. La precisión de detección referida (cercana al 95%, en Uruguay hemos tenido un índice cercano al 97% en estos últimos 4 años) procede de observaciones de validación previas y bajo condiciones controladas, no de una métrica de sensibilidad establecida en este diseño experimental. Ningún sistema de monitoreo basado en umbrales elimina por completo los falsos negativos, en particular en infestaciones muy incipientes o fuera del alcance efectivo del sensor (determinado empíricamente en unos 130 cm en palmera datilera).
No reemplaza la inspección técnica. El sensor estima actividad biológica, no diagnostica. La interpretación de sus datos, la decisión de tratar y la evaluación integral del estado de la palmera siguen requiriendo criterio técnico de campo.
No reemplaza los tratamientos. El dispositivo es una herramienta de monitoreo y soporte a la decisión. La eliminación de la plaga depende de las medidas fitosanitarias aplicadas, no del sensor.
No demuestra igual desempeño en todas las especies de palmeras. El estudio se desarrolló en P. dactylifera. Aunque los autores mencionan verificaciones previas en Phoenix canariensis y observaciones no publicadas que sugieren beneficios al instalar sensores en la porción apical de esa especie (donde se concentra el 80%-90% de la infestación, frente a la base del estípite en la datilera), esto no equivale a una validación formal del rendimiento en otras especies ni en otros contextos fitosanitarios.
No es una comparación de eficacia entre tratamientos. Los autores aclaran de forma expresa que el estudio no buscó comparar la efectividad de imidacloprid, fosfina y nematodos entre sí. Cada uno se aplicó en una localidad y un contexto distintos, por lo que las diferencias observadas no pueden interpretarse como un ranking de eficacia.
No constituye una solución independiente. El sensor adquiere valor dentro de un programa integral de manejo, no como sustituto de las prácticas de prevención, inspección y control.
Implicancias para América Latina
En los países de América Latina donde el picudo rojo recién comienza a expandirse, la fase de invasión es precisamente aquella en la que la detección precoz aporta mayor retorno. La literatura coincide en que existe una relación directa entre el éxito en contener una población de la plaga y el tiempo transcurrido entre la detección y la respuesta. Cuanto antes se identifica una palmera colonizada, mayores son las probabilidades de tratarla con éxito y de evitar que actúe como foco de dispersión hacia ejemplares vecinos.
En este escenario, un sistema capaz de señalar actividad interna antes de la aparición de síntomas externos, y de verificar después si el tratamiento fue efectivo, encaja bien en programas de vigilancia temprana y de seguimiento. Para responsables de espacios verdes, técnicos municipales y gestores de grandes conjuntos de palmeras, la posibilidad de priorizar intervenciones sobre los ejemplares que realmente las necesitan es de interés operativo y económico, especialmente cuando el patrimonio a proteger es numeroso y disperso.
Conviene, sin embargo, trasladar las precauciones del estudio a este contexto. Buena parte de las palmeras ornamentales de la región pertenecen a especies distintas de la datilera, con anatomías y patrones de infestación propios. La ubicación óptima del sensor, su alcance efectivo y la calibración de umbrales no son necesariamente transferibles sin verificación local. La incorporación de esta tecnología debería plantearse como un componente más dentro de un esquema de manejo integrado, acompañado de inspección técnica, prospección y las medidas de control disponibles.
Conclusión
La contribución principal del trabajo de Mendel y colaboradores es demostrar, con datos de campo en plantaciones comerciales, que los sensores sísmicos pueden funcionar como herramientas de apoyo a la toma de decisiones dentro de programas de manejo del picudo rojo. Su utilidad probada abarca tres funciones encadenadas: indicar cuándo la actividad de la plaga justifica intervenir, evaluar objetivamente si el tratamiento aplicado fue eficaz y seguir la recuperación de la palmera en el tiempo.
El estudio no presenta a esta tecnología como un sustituto de la inspección, del tratamiento ni del criterio agronómico, ni como una herramienta de validez universal en cualquier especie o contexto. Su aporte es más preciso y, por eso mismo, más sólido: situar el monitoreo sísmico como un instrumento que mejora la base de información sobre la que se construyen las decisiones fitosanitarias. En la gestión de una plaga cuya principal dificultad ha sido siempre la de «ver» lo que ocurre dentro del estípite, disponer de una medida objetiva y repetible de la actividad interna constituye un avance concreto para el manejo integrado de plagas en sanidad de palmeras.
Referencias
Mendel, Z., Voet, H., Modan, N., Naor, R. y Ment, D. (2024). Seismic sensor-based management of the red palm weevil Rhynchophorus ferrugineus in date palm plantations. Pest Management Science, 80(3), 1053-1064. https://doi.org/10.1002/ps.7836
El-Shafie, H. A. F. y Faleiro, J. R. (2020). Red palm weevil Rhynchophorus ferrugineus (Coleoptera: Curculionidae): global invasion, current management options, challenges and future prospects. En Invasive Species: Introduction Pathways, Economic Impact, and Possible Management Options. IntechOpen. https://doi.org/10.5772/intechopen.93391
Dembilio, Ó. y Jacas, J. A. (2011). Basic bio-ecological parameters of the invasive red palm weevil, Rhynchophorus ferrugineus (Coleoptera: Curculionidae), in Phoenix canariensis under Mediterranean climate. Bulletin of Entomological Research, 101(2), 153-163. https://doi.org/10.1017/S0007485310000283
Sutanto, K. D., Husain, M., Rasool, K. G., Mankin, R. W., Omer, A. O. y Aldawood, A. S. (2023). Acoustic comparisons of red palm weevil (Rhynchophorus ferrugineus) mortality in naturally infested date palms after injection with entomopathogenic fungi or nematodes, aluminum phosphide fumigation, or insecticidal spray treatments. Insects, 14(4), 339. https://doi.org/10.3390/insects14040339

Ing. Tec. Gerardo Grinvald, Director de Equitec
Te invito a seguirnos en nuestras redes y descubrir más sobre lo que hacemos
Allí compartimos experiencias reales, testimonios y aprendizajes que reflejan nuestro trabajo día a día
¿Nos sigues en Instagram?
En nuestro IG compartimos experiencias, errores y aprendizajes:

